工業機器人和機械手臂的區別
目前市場上出現許多機械臂,很多小伙伴不能區分機械臂和機器人是不是同一種概念,今天小編和大伙講解講解。
機械臂是一種機械裝置,可以是自動的也可以是人為控制的;
工業機器人是一種自動化設備,機械臂是工業機器人的一種,工業機器人也有其它形式。所以雖然兩者含義不同,但是指代的內容有重合的部分。
所以簡單來說,工業機器人的形式有很多種,機械臂只是其中一種。
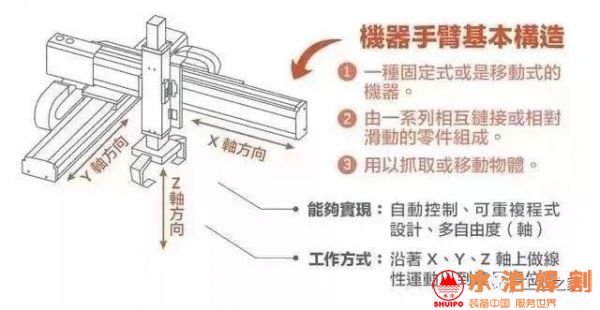
>>>> 機械手臂
機械手臂是“一種固定或移動式的機器,其構造通常由一系列相互鏈接或相對滑動的零件組成,用以抓取或移動物體,能夠實現自動控制、可重復程序設計、多自由度(軸)。其工作方式主要通過沿著X、Y、Z軸上做線性運動以到達目標位置。”
>>>> 工業機器人?
根據ISO 8373定義,工業機器人是自動執行工作的機器裝置,是靠自身動力和控制能力來實現各種功能的一種機器。它可以接受人類指揮,也可以按照預先編排的程序運行,現代的工業機器人還可以根據人工智能技術制定的原則綱領行動。
>>>> 機器人與機械臂的區別
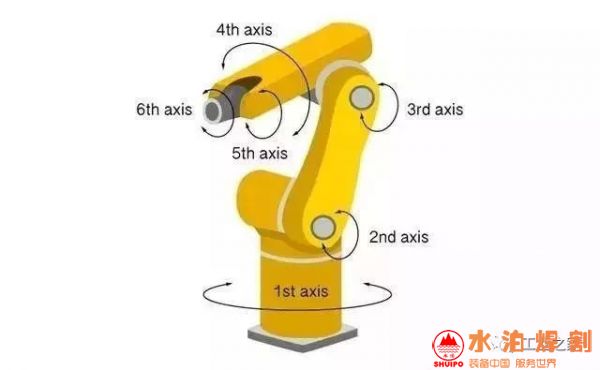
機械臂是機器人領域中使用廣泛的一種機械裝置,廣泛應用于工業、醫療甚至軍事、太空領域。機械臂分四軸五軸六軸多軸,3D/2D機器人,獨立機械臂、油壓機械臂等,雖然種類很多,但是它們有一個共同點就是能接收指令并準確定位到三維(或者二維)空間上的點進行作業。
機器人與機械臂不同的是,機器人既可以接收人類的指令,還可以按照人類預先編排好程序執行作業,還可以根據人工智能指定的原則行動。在未來機器人將更多地協助或取代人類的工作,特別是一些重復性的工作,危險的工作等。
歐美國家與日本對機器人的定義有所不同:
歐美國家認為機器人應該是由計算機控制的,通過編程使得機器人成為多功能的自動機械;日本則認為機器人是高級的自動機械,所以機械臂就被包含進機器人的定義了。
歐美國家認為6軸及以上的機械臂可以稱之為機器人,5軸及以下的只能叫機械臂;日本則把3軸機械臂定義為機器人。
現在國際上對機器人的概念已基本趨于一致,都認為機器人是靠自身動力和控制能力實現各種功能的一種自動化機械。
機器人與機械臂在應用范圍上的區別:
機械臂在工業界應用廣泛,其包含的主要技術是驅動和控制,機械臂一般都是串聯結構。
機器人主要分為串聯結構與并聯結構:
并聯機器人(PM)多用于需要高剛度、高精度、高速度,無需大空間的場合,具體應用于分揀、搬運、模擬運動、并聯機床、金屬切削加工、機器人關節,航天器接口等;
串聯機器人與并聯機器人在應用上構成互補關系,串聯機器人的工作空間大,可以避免驅動軸之間的耦合效應。但其機構各軸要獨立控制,而且需要編碼器和傳感器來提高運動精準度。

